前言
本文主要分析adaboost、GBDT和xgboost等提升方法。本文从决策树开始,梳理出boosting算法的原理,和各种不同boosting算法之间的差异和适用场景,并结合具体案例进行分析。
本文主要内容如下:
- 决策树
-
原理
-
CART算法
-
- Boosting
- 原理
- adaboost
- GBDT
- xgboost
决策树
原理
决策树是一种基本的分类和回归方法,通过树形结构对实例进行分类(回归同理),可以认为是if-then规则的集合,也可以认为是定义在特征空间与类空间上的条件概率分布。决策树本质上是从训练数据集中归纳出一组分类规则(对应if-then规则),从另一个角度,决策树学习是由训练集估计条件概率模型。
决策树可能有多个,目的是选出一个最优的决策树,但是这个问题是一个NP问题,因此,决策树算法是一种启发式方法,选择的结果是次最优的。决策树算法通常是一个递归选择最优特征,并根据该特征对特征空间进行划分,对应着决策树的构建的一种算法。
优点:可读性高,分类速度快。
决策树主要分三个步骤:特征选择,决策树生成和决策树剪枝。
决策树算法主要有ID3和C4.5,用以分类问题;CART既能分类,又能做回归问题。
接下来从决策树的三个步骤分别进行阐述:
特征选择
特征选择的标准是信息增益或信息增益比。
-
名词解释
-
熵(entropy)$H(X)$
熵是随机变量不稳定的度量。(我们想要的是熵小)
设$X$是一个取有限个离散的随机变量,概率分布为
则熵定义为:
若$p_i=0$,则认为$0log0=0$,若log以2为底,熵的单位是比特(bit),若log以e为底,熵的单位是纳特(nat)。
当熵由数据计算出来的时候,称为经验熵。
-
条件熵(conditional entropy)
表示已知随机变量X的条件下随机变量Y的不确定性。
其中,
当条件熵有数据计算出来的时候,称为经验条件熵。
-
信息增益
信息增益就是经验熵和经验条件熵之差,也叫互信息(mutual information)
可以认为这里的D是label,A为特征的一个。
-
信息增益比
,
其中, n是特征A取值的个数。
-
-
信息增益算法
- 计算经验熵H(D)
- 计算经验条件熵$H(D \mid A)$
- 计算信息增益 $g(D \mid A) = H(D) - H(D \mid A)$
决策树生成
- 主要有两个算法:ID3和C4.5
- 两者的区别在于ID3采用信息增益来选择特征;C4.5采用信息增益比来选择特征;
决策树的剪枝
决策树的剪枝往往通过极小化决策树整体的损失函数(loss function)来实现。损失函数定义为:
其中,$H_t(T)$为叶节点t上的经验熵,$a \geq 0$为参数。经验熵, 因此上式的第一项就变成了$C(T) = - \sum \limits_{t=1}^{|T|}\sum\limits_{k=1}^KN_{tk}log\frac{N_{tk}}{N_t}$, 此时上式就变成了 $C_a{T}=C(T)+a|T|$, 第一项表示模型对训练数据的预测误差,$|T|$表示模型复杂度,参数$a$控制两者的关系。较大的$a$促使选择较简单的模型树,较小的$a$促使选择较复杂的模型树。
CART算法
原理
CART算法即可用于分类,也可用于回归。是在给定输入随机变量X条件下输出随机变量Y的条件概率分布的学习方法。CART中的决策树是二叉树。
CART算法由两步组成:决策树生成,且生成的决策树要尽量大;决策树剪枝,以损失函数最小为剪枝的标准。
CART生成
生成CART针对分类问题和回归问题所采用的准则不同,分类问题用基尼指数(Gini index),回归问题用平方误差最小化准则。
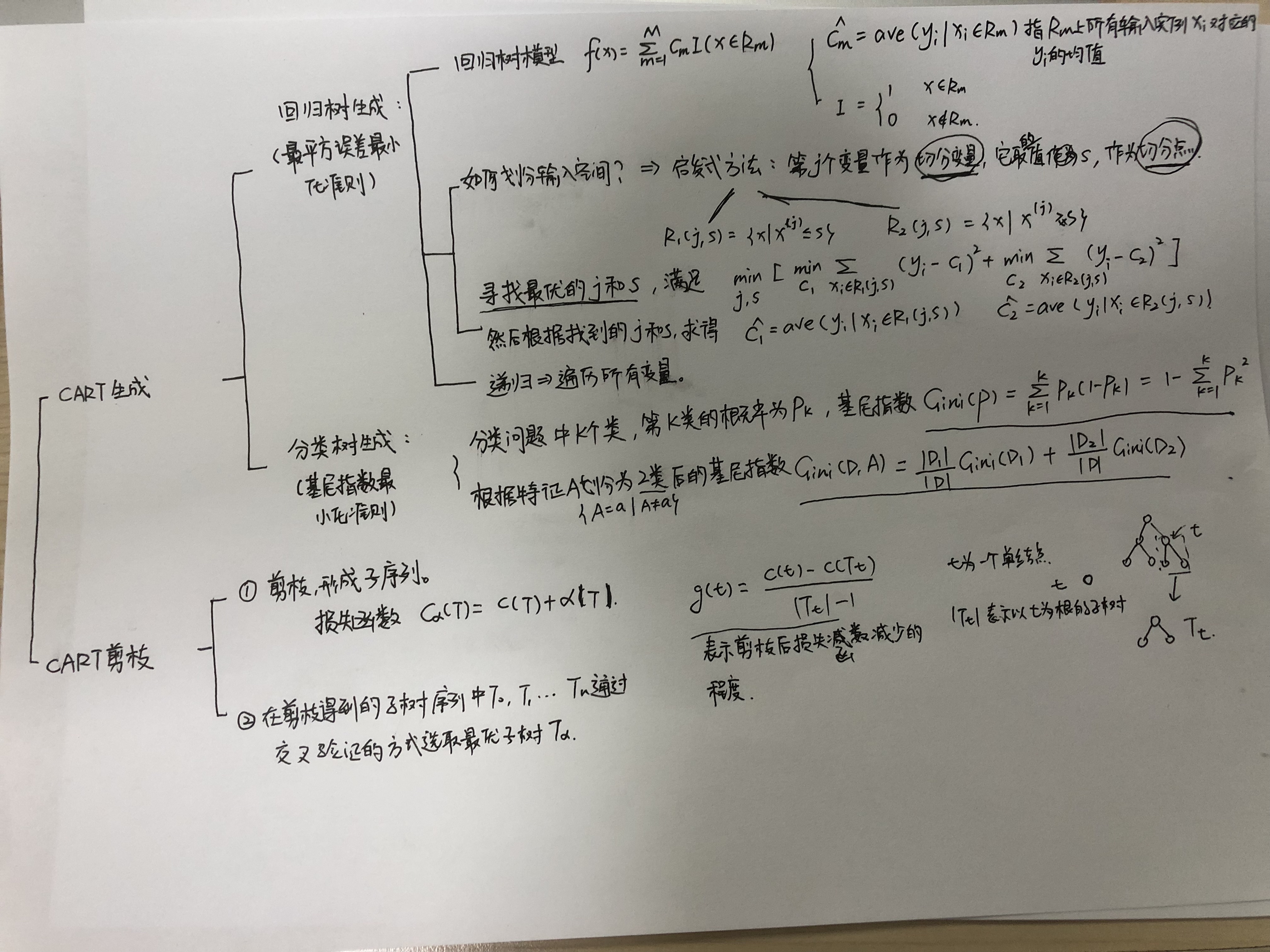
CART的算法:
输入:CART算法生成的决策树$T_0$
输出:最优决策树$T_a$
- 设k=0,T=$T_0$, $a=+fin$
- 自下而上对各内部结点t计算$C(T_t)$, $|T_t|$以及 $g(t)=\frac{C(t)-C(T_t)}{|T_t|-1}$ $a=min(a, g(t))$ 这里,$T_t$表示以t为根节点的子树,$C(T_t)$是对训练数据的预测误差,$|T_t|$是$T_t$的叶节点的个数。C(t)表示t为单个结点时的对训练数据的预测误差。
- 对$g(t)=a$的内部结点t进行剪枝,并对叶节点t以多数表决法决定其类,得到树T。
- 设$k=k+1, a_k=a, T_k=T$
- 如果$T_k$不是由根节点及两个叶节点构成的树,则回到步骤3;否则令$T_k=T_n$
- 采用交叉验证法在子树序列$T_0,T_1,…T_n$中选取最有子树$T_a$.
提升方法
原理
提升方法通过改变训练样本的权重,学习多个分类器,并将这些分类器进行线性组合,提高分类的性能。
adaboost
可参见博客
他是一个加法模型,损失函数是指数函数,学习算法是前向分布算法的二类分类学习方法。
- Adaboost优点
- 不容易发生过拟合。
- Adaboost是一种有很高精度的分类器。
- 当使用简单分类器时,计算出的结果是可理解的。
- 可以使用各种方法构建子分类器,Adaboost算法提供的是框架。
- Adaboost缺点
- 训练时间过长。
- 执行效果依赖于弱分类器的选择。
- 对样本敏感,异常样本在迭代中可能会获得较高的权重,影响最终的强学习器的预测准确性。
提升树
采用加法模型与前向分步算法,以决策树为基函数的提升方法。在分类问题上,只需将基函数变成决策树,其他和adaboost基本一致。在回归问题上,通过计算第一步计算残差的方式,后续的每一步均是对上一步计算的残差进行学习一个回归树。
该方法通过计算残差的方式,而并非通过损失函数拟合。因此后续出来了GBDT提出用损失函数的负梯度来拟合本轮损失的近似值,进而拟合一个CART回归树。
可分类,可回归
GBDT
可参见博客
多元分类和回归
- 优点
- 相对少的调参时间情况下可以得到较高的准确率。
- 可灵活处理各种类型数据,包括连续值和离散值,使用范围广。
- 可使用一些健壮的损失函数,对异常值的鲁棒性较强,比如Huber损失函数。
- 缺点
- 弱学习器之间存在依赖关系,难以并行训练数据。
XGboost
主要是Xgboost和GBDT的差异:
-
传统的GBDT以CART树作为基学习器,XGBoost还支持线性分类器,这个时候XGBoost相当于L1和L2正则化的逻辑斯蒂回归(分类)或者线性回归(回归);
-
传统的GBDT在优化的时候只用到一阶导数信息,XGBoost则对代价函数进行了二阶泰勒展开,得到一阶和二阶导数;
-
xgboost可自定义目标函数,但是目标函数必须二阶可导。
-
XGBoost在代价函数中加入了正则项,用于控制模型的复杂度。从权衡方差偏差来看,它降低了模型的方差,使学习出来的模型更加简单,防止过拟合,这也是XGBoost优于传统GBDT的一个特性;
-
shrinkage(缩减),相当于学习速率(XGBoost中的eta)。XGBoost在进行完一次迭代时,会将叶子节点的权值乘上该系数,主要是为了削弱每棵树的影响,让后面有更大的学习空间。(GBDT也有学习速率);
-
列抽样。XGBoost借鉴了随机森林的做法,支持列抽样,不仅防止过拟合,还能减少计算;
-
对缺失值的处理。对于特征的值有缺失的样本,XGBoost还可以自动 学习出它的分裂方向;
-
XGBoost工具支持并行,在特征粒度的并行。我们知道,决策树的学习最耗时的一个步骤就是对特征的值进行排序(因为要确定最佳分割点),XGBoost在训练之前,预先对数据进行了排序,然后保存为block结构,后面的迭代 中重复地使用这个结构,大大减小计算量。这个block结构也使得并行成为了可能,在进行节点的分裂时,需要计算每个特征的增益,最终选增益最大的那个特征去做分裂,那么各个特征的增益计算就可以开多线程进行。
-
xgboost在算法实现时做了很多优化,大大提升了算法的效率!
-
对训练的每个特征排序并且以块的的结构存储在内存中,方便后面迭代重复使用,减少计算量,不仅如此,在不同的特征属性上采用多线程并行方式寻找最佳分割点
- 上述的优化导致每个样本的梯度信息在内存中不连续,直接累加有可能会导致cache-miss,所以xgboost先将样本的统计信息取到线程的内部buffer,然后再进行小批量的累加
- xgboost在实现时考虑了当训练数据很大、内存空间不够时,如何有效的利用磁盘空间?主要是利用了分块、预取、压缩、多线程协作的思想。
参考文献:
- https://blog.csdn.net/qq_28031525/article/details/70207918
- 李航统计机器学习
- https://weizhixiaoyi.com/
- 知乎:https://www.zhihu.com/question/41354392